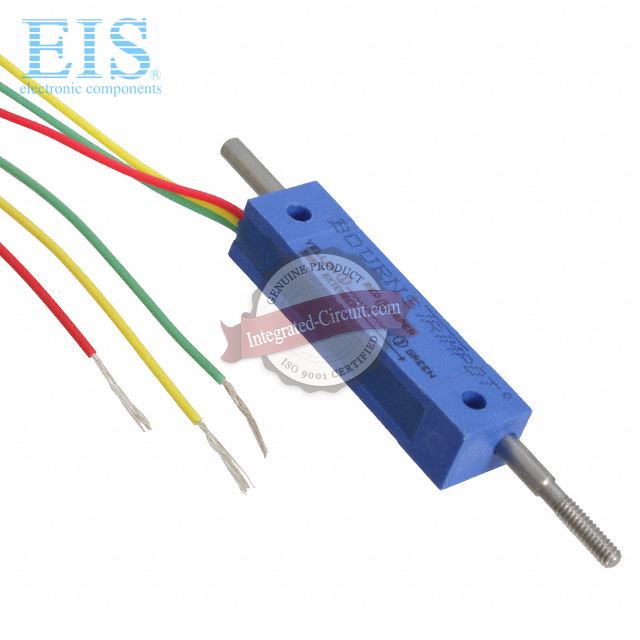
Bourns Inc. 3046L-2-503
- 제조업체 부품 번호
- 3046L-2-503
- 제조업 자
- Bourns Inc.
- 제품 카테고리
- 위치 센서 - 각도, 선형 위치 측정
- 간단한 설명
- POT LINEAR POSITION
- Datesheet 다운로드
- 다운로드
3046L-2-503 가격 및 조달
가능 수량
1150 조각
배송 오늘
창고: HONGKONG
Date Code: 최신 Date Code
제조업체 표준 리드 타임: 6 주
- 시장 가격
- ₩ 14,332.04000
- 우리의 가격
- Quote by Email
We are the stock Distributor of 3046L-2-503, we specialize in all series Bourns Inc. electronic components. 3046L-2-503 can be shipped within 24 hours after order. If you have any demands for 3046L-2-503, Please kindly submit an RFQ here or send us an email.
- 3046L-2-503 주문 프로세스
- 문의 양식에 추가
- 견적 요청
- 우리는 24 시간 이내에 회신
- 당신은 순서를 확인
- 지불
- 주문 발송
3046L-2-503 매개 변수
| 내부 부품 번호 | EIS-3046L-2-503 | |
| 무연 여부 / RoHS 준수 여부 | 무연 / RoHS 준수 | |
| 수분 민감도 레벨(MSL) | 1(무제한) | |
| 생산 현황 (라이프 사이클) | In Production | |
| 지위 | New & Unused, Original Sealed | |
| 규격서 | 3046 Series | |
| 비디오 파일 | Bourns Non-contacting Programmable Position Sensors - Another Geek Moment Product Preview | |
| 특정유해물질규제지침(RoHS) 정보 | 3046 Material Declaration | |
| 3D 모델 | 3406L-2.stp | |
| PCN 기타 | Multiple Changes 01/Dec/2012 | |
| 종류 | 센서, 트랜스듀서 | |
| 제품군 | 위치 센서 - 각도, 선형 위치 측정 | |
| 제조업체 | Bourns Inc. | |
| 계열 | - | |
| 부품 현황 | * | |
| 측정용 | 선형 위치 | |
| 기술 | 저항 | |
| 회전 각도 - 전기, 기계 | - | |
| 선형 범위 | 0 ~ 6.35mm(0 ~ 0.25") | |
| 출력 | 저항 | |
| 출력 신호 | - | |
| 액추에이터 유형 | 원형 축 | |
| 선형성 | ±5% | |
| 저항(옴) | 50k | |
| 저항 허용 오차 | ±20% | |
| 전압 - 공급 | - | |
| 실장 유형 | 섀시 실장 | |
| 종단 유형 | 와이어 리드 | |
| 작동 온도 | -55°C ~ 125°C | |
| 표준 포장 | 25 | |
| 무게 | 0.001 KG | |
| 신청 | Email for details | |
| 대체 부품 (교체) | 3046L-2-503 | |
| 관련 링크 | 3046L, 3046L-2-503 Datasheet, Bourns Inc. Distributor | |
3046L-2-503 의 관련 제품
 | 30D107M200LS2A | 100µF 200V Aluminum Capacitors Axial, Can 1.609 Ohm @ 120Hz 2000 Hrs @ 85°C | 30D107M200LS2A.pdf | |
 | GRM1887U2A6R4DZ01D | 6.4pF 100V 세라믹 커패시터 U2J 0603(1608 미터법) 0.063" L x 0.031" W(1.60mm x 0.80mm) | GRM1887U2A6R4DZ01D.pdf | |
| PESD5V0S1BLD,315 | TVS DIODE 5VWM 14VC SOD882 | PESD5V0S1BLD,315.pdf | |
 | 1.5KE180CAHE3/54 | TVS DIODE 154VWM 246VC 1.5KE | 1.5KE180CAHE3/54.pdf | |
 | MBRF1660-E3/45 | DIODE SCHOTTKY 60V 16A ITO220AC | MBRF1660-E3/45.pdf | |
 | PA0766.341NLT | Unshielded 2 Coil Inductor Array 704nH Inductance - Connected in Series 176nH Inductance - Connected in Parallel 0.38 mOhm Max DC Resistance (DCR) - Parallel 52A Nonstandard | PA0766.341NLT.pdf | |
 | LQP03TG0N2C02D | 0.2nH Unshielded Thin Film Inductor 850mA 80 mOhm Max 0201 (0603 Metric) | LQP03TG0N2C02D.pdf | |
.jpg) | RC1608F5R1CS | RES SMD 5.1 OHM 1% 1/10W 0603 | RC1608F5R1CS.pdf | |
.jpg) | RT0603DRE0730KL | RES SMD 30K OHM 0.5% 1/10W 0603 | RT0603DRE0730KL.pdf | |
 | TNPU0805470RBZEN00 | RES SMD 470 OHM 0.1% 1/8W 0805 | TNPU0805470RBZEN00.pdf | |
| Y16254K45200Q0R | RES SMD 4.452K OHM 0.3W 1206 | Y16254K45200Q0R.pdf | |
 | Y00078K02000T0L | RES 8.02K OHM 0.6W 0.01% RADIAL | Y00078K02000T0L.pdf |
